technology
TECHNOLOGY
SWARM AI TECHNOLOGY
AI 기반 자율·군집비행을 위한 HW·SW 핵심기술
SWARM-X는 국산 핵심부품, 온디바이스AI, SLAM 기반 3D 인식, 이기종 통합관제 GCS를 결합하여 자율·군집비행에 최적화된 기술 플랫폼을 구현합니다.
군집드론 HW
AI 군집드론 핵심부품 개발
-

소형 Flight Controller
- STM32 기반 고신뢰 설계
- 3중 센서 구조(IMU, 자이로, 가속도) 적용
▶ 군집비행 안정성 확보
- MAVLink 및 자체 프로토콜 지원
-
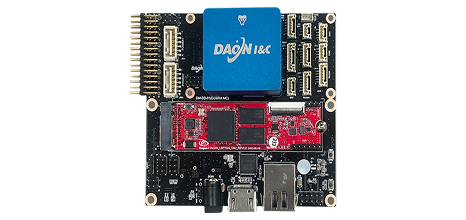
AI + Mission Computer 통합 보드
- Edge AI(Regulus / Tachy V1 등 ) 기반
- EO/IR 영상 실시간 분석, 경로 재설정 타겟 인식 수행
- FC·AI 연산 통합 → 경량화 & 전력 효율 최적화
-
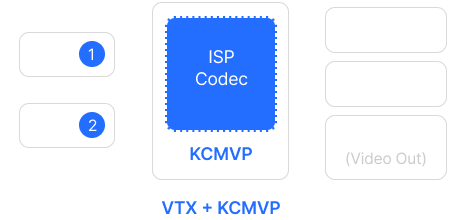
VTX·KCMVP 국산화
- 한국 암호모듈 검증 프로그램(KCMVP) 적용
▶ 군실시간 암복호화 지원(Real-Time)
- 카메라, 영상송수신 + RF 모듈 국산화
- 한국 암호모듈 검증 프로그램(KCMVP) 적용
AI 군집드론 기체 설계제작
-

국산 NPU 기반 온디바이스 AI 탑재 정찰용 군집 드론
- 온디바이스 AI(NPU) 기반 표적 식별·맵핑 및 정찰 임무를 수행하는 지능형 군집드론
- 광범위한 지역을 동시에 탐색하는 자율형 군집 수색드론
-
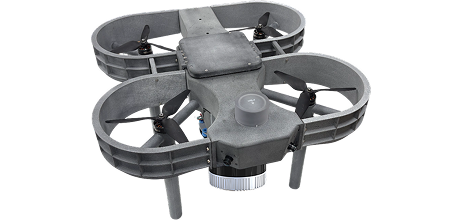
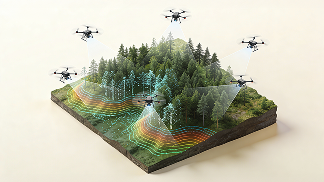
GPU 기반 온디바이스 AI 탑재 수색정찰 군집드론
- AI(GPU) + 3D 맵핑 자율비행 기반 탐지·수색에 특화된 군집드론
- GPS 신호가 제한된 환경에서도 SLAM 기반 자율비행과 드론 간 네트워크를 통행 통신 의존도를 최소화한 운용이 가능
-
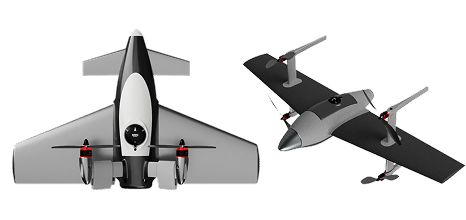
테일시터 VTOL (XV600 / XV1200)
- STM32 기반 고신뢰 설계
- 3중 센서 구조(IMU, 자이로, 가속도) 적용
▶ 군집비행 안정성 확보
- MAVLink 및 자체 프로토콜 지원
군집드론 SW
AI 군집드론 SW 연구개발
-
군집 맵핑 3D 공간 시각화 SW
- 다수 드론 센서 데이터를 통합하여 3D 공간을 실시간 재구성
- 임무 계획, 장애물 회피, 상황 이해를 위한 시각화 제공
-

군집드론 자율 주행 SW
- GPS, 통신 제약 환경에서도 경로 생성 및 자율 항법 수행
- 다수 드론의 충돌 방지 및 협업 비행 최적화
-

AI 기반 객체·환경 인식 및 3D 분석 SW
- 온디바이스 AI 딥러닝 기반 EO/IR 객체·환경 인식
- 모노뎁스·삼각측량 기반 AI 3D 인식 및 분석 SW
-

이기종 기체 통합 임무제어 프로그램
- AI 기반 자율비행 군집드론 통합 관제 시스템
- 고정익, 멀테곱터, 수상드론 등 다양한 기종을 단일 인터페이스에서 통합 제어
- 임무 분담, 협업 비행, 상황 모니터링 통합 제공
Technical Highlight
-
01
핵심부품 및 기체 전면 국산화로
공급망 리스크 최소화 -
02
AI · FC 통합 설계로
기체 단위 자율 판단 · 임무 수행 능력 확보 -
03
군집비행 · 맵핑 · 관제
전 주기 SW 자체 개발 -
04
SLAM · 모노뎁스 · 삼각측량 기발
특허 출원 중 : 군집드론을 이용한 객체의 3차원 좌표 연산 방법,
3D 분석 및 상황인지 강화
이를 위한 드론장치 및 군집드론 시스템 10-2024-0157007 -
05
KCMVP 기반
VTX·KCMVP 국산화 및 실시간 암복호화
보안 통신 체계로국방·공공 임무환경 대응
기반안정적인 데이터 전송 체계 확보 -
06
공공 연구기관 · 대기업 기술이전 및
ETRI 자율수색드론 시스템, SK·삼성전자 특허 및 기술 이전
특허 실시권 기반 핵심 기술 확보