technology
TECHNOLOGY
SWARM AI TECHNOLOGY
SWARM-X implements a technology platform optimized for autonomous and swarm flight
by integrating Korean-made core components, on-device AI, SLAM-based 3D perception, and an integrated GCS for heterogeneous drone operations
Swarm Drone HW
AI Swarm Drone Core Component Development
-

Compact Flight Controller
- STM32-based high-performance design
- Triple-sensor architecture(IMU, Barometer, Accelerometer)
for stable swarm flight
- MAVLink and proprietary protocol support
-
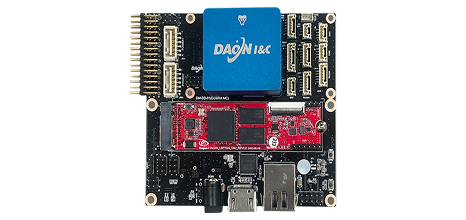
AI + Mission Computer Integrated Board
- Edge AI-based processing(Regulus / Tachy V1)
- Real-time EO/IR analysis, path reconfiguration, and target recognition
- Integrated FC-AI architecture for lightweight and power-efficient operation
-
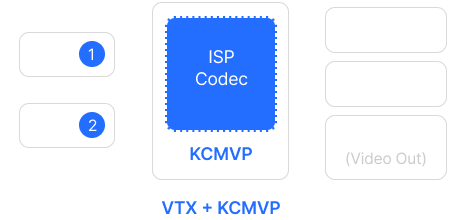
Localization of VTX·KCMVP
- Applied Korea Cryptographic Module Validation Program(KCMVP)
▶ Supports real-time encrypted video transmission
- Localization of camera, video transmission, RF modules
- Applied Korea Cryptographic Module Validation Program(KCMVP)
AI Swarm Drone AirFrame Design & Manufacturing
-

Precision Strike Swarm Drone with Domestic NPU-Based On-Device AI
- On-device AI(NPU) for real-time target detection and strike missions
- Autonomous swarm reconnaissance over wide-area operations
-
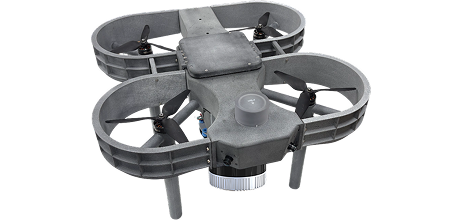
Maritime Policing Swarm Drone with GPU-Based On-Device AI
- (GPU) + 3D mapping-based autonomous detection and reconnaissance
- SLAM-based autonomous flight in GPS-denied environments with reduced communication dependency through inter-drone networking
-
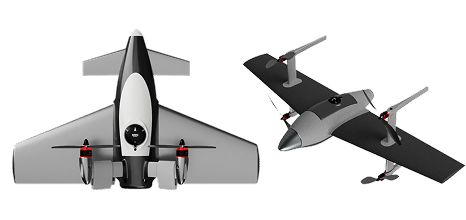
Tail-Sitter VTOL (XV600 / XV1200)
- VTOL with high-speed, high-efficiency fixed-wing flight
- Autonomous short-mid range missions(OSR, strike, loitering)
- Swarm-optimized structural design
Swarm Drone SW
AI-Based Swarm Drone Software R&D
-
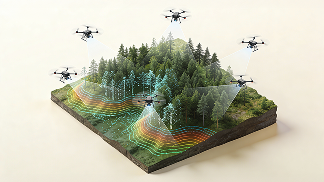
Swarm Mapping & 3D Spatial Visualization Software
- Real-time 3D environment reconstruction through multi-drone sensor data fusion
- Visualization for mission planning, obstacle avoidance, and situational awareness
-

Swarm Autonomous Navigation Software
- Path generation and autonomous cooperative flight in GPS- and communication-constrained environments
- Collision avoidance and optimized collaborative swarm operations
-

AI-Based Object & Environment Recognition and 3D Analysis Software
- On-device deep learning-based EO/IR object and environment recognition
- Model-based triangulation for AI-driven 3D perception and analysis
-

Integrated Multi-Platform Mission Control Program
- AI-based integrated C2 for autonomous swarm operations
- Unified control of fixed-wing, multirotor, and USVs
- Mission allocation, cooperative flight, and real-time monitoring
Technical Highlight
-
01
Localization of core components and airframes to minimize supply chain risk
-
02
Integrated AI-FC architecture enabling autonomous decision-making and mission execution at the platform level
-
03
In-house development of full-cycle swarm software(flight, mapping, and control)
-
04
SLAM and model-based triangulation-driven 3D analysis and enhanced situational awareness
Patent pending : 3D coordinate computation method using swarm drones and related drone station & system(NO. 10-2024-0157007) -
05
KCMVP-Based Secure Communication Systemfor Defense and Public Mission Environments
Localization of VTX and KCMVP technologies with real-time encryption/decryption to ensure stable and secure data transmission -
06
Secured core technologies through technology transfer and patent licensing from public research institutes and major corporations
ETRI autonomous reconnaissance drone system, licensed patents from SK and Samsung Electronics